
Un peu d’histoire
Premier sous-marin armé de fusées au monde, datant de 1834
La guerre navale a été modifiée dans les années 1960 lorsque la marine américaine a commencé à déployer des missiles sur les sous-marins. Les férus d’histoire feront peut-être remarquer que la Russie, alors URSS, les a en fait devancés de plusieurs années. Les premiers sous-marins russes équipés de missiles balistiques naviguaient à la fin des années 1950. Mais la Russie les a devancés de bien plus que quelques années. Le premier sous-marin russe armé d’une fusée date des années 1830.
Et il était doté d’un système de lancement submergé, ce qui a pris du temps lorsqu’ils l’ont essayé pendant la guerre froide.
L’inventeur russe, l’adjudant général K.A. Schilder (1785 – 1854), était un expert dans de nombreux aspects du génie militaire. Vétéran des combats, il était expert en fusées, mines, ponts, tunnels et fortifications. Mais il était également un pionnier notable des sous-marins qui est peut-être beaucoup moins connu qu’il ne devrait l’être.
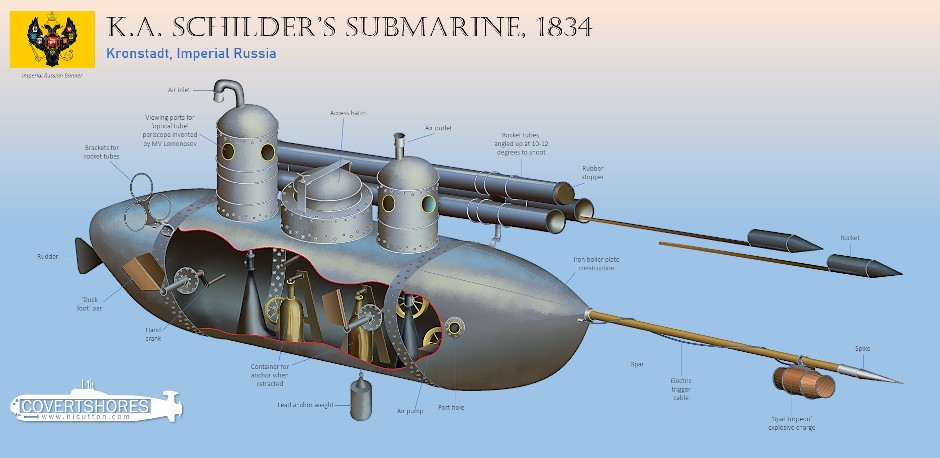
Karl Andreevich (KA) Schilder a construit son premier sous-marin en 1834. Le navire a été construit à la fonderie Aleksandrovsky de Saint-Pétersbourg, qui est aujourd’hui célèbre sous le nom de Proletarsky Zavod. Il déplaçait (peut-être pesait-il) 16 tonnes et pouvait plonger à une profondeur d’environ 12 mètres (39 pieds).

Et, comme j’y ai fait allusion, il était lourdement armé. Il avait deux ensembles de trois tubes de fusée de chaque côté de la coque. Ils étaient inclinés vers le haut de 10 à 12 degrés et pouvaient être tirés en surface ou en plongée. Elles ont été testées et, même si elles n’étaient pas très précises, elles constituaient une réelle capacité.
Il y avait également une torpille à espar. À bien des égards, c’était le précurseur du sous-marin H.L. Hunley, beaucoup plus célèbre pendant la guerre de Sécession. Ou les béliers torpilleurs semi-submersibles de la classe David.
La navigation se faisait par le biais d’un « tube optique » transporté dans deux tours. Il s’agissait d’une forme de périscope primitif. D’autres caractéristiques avancées comprenaient des entrées et sorties d’air avec une sorte de système de pompe pour rafraîchir l’air. La pompe a été conçue par A.A. Sablukova et devait être tournée à la main. Le ballast était contrôlé par deux réservoirs d’eau.
Le sous-marin de 8 personnes pouvait rester immobile sous l’eau pendant plusieurs heures grâce à deux ancres en plomb. Celles-ci étaient actionnées depuis l’intérieur du sous-marin.

La grande faiblesse était la mobilité. L’époque n’étant pas encore aux sources d’énergie efficaces pour les sous-marins, la propulsion était humaine. Quatre avirons « pieds de canard » à manivelle lui donnaient une vitesse de pointe de seulement 0,3 nœud. C’est beaucoup plus lent qu’un nageur. Ou les courants de nombreuses rivières ou mers. De plus, les tubes optiques ne fonctionnaient que lorsque le sous-marin était semi-immergé. Et comme ils étaient le seul moyen de navigation, il était effectivement aveugle lorsqu’il était complètement immergé.
Cela signifie qu’il était trop lent pour s’approcher d’une cible dans des conditions normales et qu’il l’aurait probablement manquée de toute façon puisqu’il fonctionnait à l’aveugle.
Schilder a construit un autre bateau en 1838. Il était plus petit et présentait quelques améliorations, mais avait finalement le même problème. Il en construit ensuite un troisième qui utilise une forme de propulsion par « jet d’eau ». Il ne s’en sort pas mieux. Malheureusement, les sous-marins ont finalement été vendus à la casse.
Le concept de remorqueur de guerre
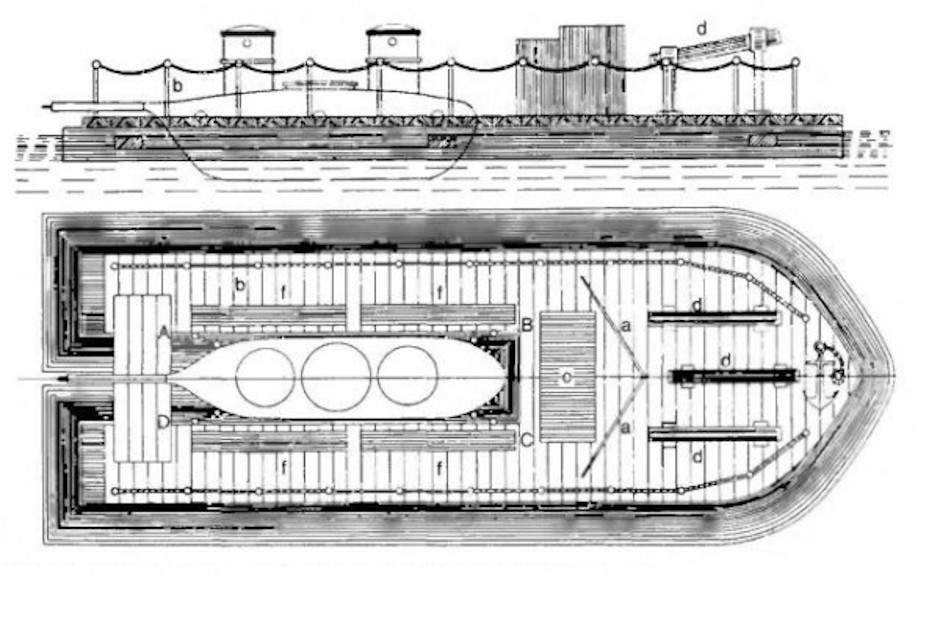
La mobilité étant la plus grande faiblesse des sous-marins à propulsion humaine, Schilder propose une barge remorquée pour les transporter au combat. Il s’agissait là aussi d’un précurseur de développements beaucoup plus modernes.
source: HI Sutton