
Propulsion par hydrojet pour les futurs sous-marins ?
Les navires de la marine américaine utilisent presque exclusivement des hélices depuis près de deux siècles mais, ces dernières années, la marine est passée à l’hydrojet sur quelques bâtiments de de surface. Les forces sous-marines ne sont peut-être pas encore prêtes à adopter un système de propulsion principal hydrojet (la « chenille» dans le film « A la poursuite d’Octobre rouge » ). En tant qu’étudiant en génie mécanique à la Naval Postgraduate School (NPS), j’ai développé les grandes lignes d’une nouvelle méthode de propulsion auxiliaire hydrojet pour sous-marins. Son adoption permettrait à la Marine de modifier les sous-marins actuels à peu de frais en leur offrant rapidement un mode de propulsion quasi silencieux.
Avantages et inconvénients de la propulsion
Une hélice déplace un grand volume d’eau à vitesse lente alors qu’un hydrojet déplace un petit volume d’eau à grande vitesse. L’hydrojet est donc capable d’offrir à un navire une vitesse bien supérieure à celle obtenue avec une hélice conventionnelle.
Une pompe pousse l’eau à travers un tube venturi vers un hydrojet, augmentant ou diminuant la vitesse de l’eau en faisant varier l’ouverture des buses (de la même manière qu’une buse de tuyau d’arrosage peut générer un jet fin et à grande vitesse ou un plus large et plus lent). Les pompes associées à l’hydrojet ont ainsi la capacité de changer la vitesse presque instantanément, de sorte que la poussée peut changer par simple action sur un bouton. Changer la vitesse avec une hélice nécessite, en revanche, d’accélérer ou ralentir la vitesse de rotation de la ligne d’arbres, ce qui prend du temps. Inverser le sens de marche d’une hélice d’avant en arrière prend encore plus de temps ; l’arbre doit s’arrêter complètement, puis repartir dans en sens inverse. Un hydrojet peut changer rapidement la direction de la poussée en positionnant un inverseur de poussée, de fait un déflecteur, dans le flux d’eau. [NDLR : système couramment adopté en aéronautique]
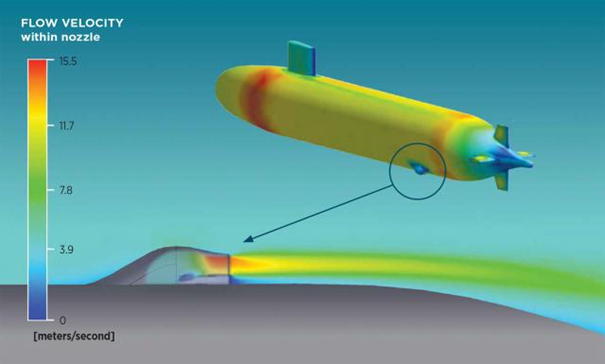
Une simulation ANSYS utilisant la conception la plus simple pour diriger l’écoulement de l’eau de refroidissement du réacteur – une unité fixe et stationnaire. Les vitesses estimées dans la plage d’écoulement vont d’environ 4 à environ 15,5 mètres / seconde, ou 7,75 à 30 nœuds. Des jets placés sur toutes les sorties pourraient générer une vitesse d’avancement pour le sous-marin entre 5 et 10 nœuds, sans générer aucun des bruits émis lorsque l’arbre principal fait tourner l’hélice du sous-marin.
La simulation, sur banc, permet de valider que l’on peut faire varier de la vitesse du flux de 4 à plus de 15m/s (soit de 8 à près de 30 nœuds). Adaptée à un sous-marin la technique permettrait de balayer une plage de vitesse entre 5 et 10 nœuds sans le bruit généré par la rotation de la ligne d’arbres qui entraine l’hélice. Non seulement es hydrojets font gagner un temps considérable [dans la manœuvre] en inversant la poussée mais il n’y pas ou peu de pièces mobiles (à l’exception de déflecteurs) ce qui en fait un moyen idéal là où la discrétion est de mise c’est à dire là où les sous-marins américains opèrent.
Les applications nécessitant des renversements de sens de marche trouvent réponse dans l’usage de l’hydrojet. Ainsi les systèmes de positionnement dynamique marins utilisent des contrôleurs informatiques piloter les hydrojets de maintien en position d’un navire. Ils sont couramment utilisés dans les installations offshore, pétrolières ou éoliennes.
En dépit des avantages de l’hydrojet, certains concepteurs de navires sont réticents quant à son emploi car il est efficace à grande vitesse mais inefficaces à faible vitesse – l’exact inverse de l’efficacité de l’hélice. Les sous-marins fonctionnent régulièrement à des vitesses lentes, ce qui fait de l’hydrojet un moyen inadapté. Cependant, l’efficacité n’est que l’un des nombreux paramètres à considérer lors de la conception, et il n’est sans doute pas le facteur déterminant dans le choix final compte tenu de la source d’énergie presque illimitée (un réacteur nucléaire) sur les sous-marins américains.
Hormis dans la fiction, peu de recherches ont été menées sur la propulsion par hydrojet. La marine a fait un petit pas dans cette direction en utilisant des pompes-hélices sur les Virginia et Columbia. Un carénage convergent entoure une hélice tant pour diminuer le bruit de cavitation que pour augmenter la vitesse de l’eau. L’’hélice fonctionne néanmoins comme une hélice conventionnelle.
Abandonner l‘hélice et mouvoir les sous-marins par hydrojets seulement exigerait un effort coûteux et herculéen, impliquant non seulement le Naval Sea Systems Command, mais aussi la division des Réacteurs Navals et les bureaux d’études des chantiers navals. Les mérites d’un tel effort sortent du cadre de cet article. Mais qu’en serait-il si un système existant pouvait être adapté pour offrir un système de propulsion auxiliaire à hydrojet à faible coût et risque minimal ?
Défi à la thermodynamique
La deuxième loi de la thermodynamique dicte, entre autres, qu’une machine ne peut pas convertir 100 pour cent de sa production de chaleur en travail l; une partie de la chaleur doit être rejetée dans l’environnement – c’est d’ailleurs la raison pour laquelle les machines à «mouvement perpétuel» sont impossibles.
Les chaufferies nucléaires embarquées disposent comme source froide d’un échangeur alimenté par pompage d’eau de mer qui est rejetée à plus haute température. Ce flux, en abord du bâtiment, ne génère aucune poussée franche. Ainsi, l’énergie utilisée pour pomper l’eau de mer est aussi gaspillée que la chaleur qu’elle échange.
Mais une buse venturi, en sortie, permettrait d’orienter le flux et générer une poussée. Si seule la poussée vers l’avant est souhaitée, il suffit d’un élément fixe- un coude, en fait – qui pourrait être installé sur n’importe quel sous-marin américain existant. Pour une poussée orientable, un système de contrôle devrait également être ajouté pour ajuster la position de chaque déflecteur. Un avantage opérationnel remarquable pourrait ainsi être obtenu simplement, pour un faible coût et un encombrement réduit dans le volume limité d’un sous-marin.
Cavitation
Moins de pièces mobiles signifie des sous-marins plus silencieux, mais ce jusqu’à un certain point. Le principe de Bernouilli stipule que lorsque la vitesse d’un fluide augmente, sa pression diminue. Si elle tombe suffisamment bas, l’eau se vaporise, formant des bulles qui éclatent bruyamment. C’est ce qu’on appelle la cavitation, un phénomène particulièrement indésirable dans le monde sous-marin.
Plus la vitesse de sortie est élevée, plus sa pression est basse et plus la probabilité de cavitation est élevée. Notons qu’une vitesse d’eau est d’autant plus élevée que la sortie est plus petite. Théoriquement, une surface de sortie infiniment petite rendrait la vitesse de l’eau presque infinie. Entre alors en compte le frottement : plus la section de sortie diminue, plus le frottement dans la buse augmente, réduisant à son tour le débit volumétrique et la poussée. Pour tout fluide donné, il existe un « point d’équilibre idéal » – une section de sortie qui maximise la poussée pour une vitesse d’écoulement donnée.
Dès lors qu’il n’y a aucune raison d’augmenter la vitesse de l’eau au-delà de ce « point d’équilibre idéal », la cavitation est intrinsèquement limitée. De plus, étant donné que le refroidissement du réacteur nucléaire est le rôle du circuit d’eau de mer et qu’il existe un débit d’eau de mer de conception minimum, la section des tuyaux ne peut pas être réduite à une taille qui serait inférieure à ce minimum.
En cas de cavitation, un dispositif de suppression du son – un déflecteur – pourrait être placé à la sortie pour réduire le bruit transmis au large.
Les déflecteurs sont utilisés depuis des décennies pour réduire le bruit des moteurs à réaction, et l’énorme avantage est qu’ils fournissent une augmentation de poussée grâce à un phénomène connu sous le nom d’entraînement.
Pour un tuyau sans déflecteur, le flux à grande vitesse sortant de la buse heurte de l’eau de mer relativement stationnaire (également appelée écoulement entraîné), transmettant une impulsion. En l’absence de surface sur laquelle s’exercer, il n’y a aucune poussée. La surface d’un déflecteur permet à ce flux d’exercer un effort, augmentant ainsi la poussée.
Les déflecteurs ne sont pas couramment utilisés dans les hydrojets car leurs surfaces doivent progressivement augmenter pour avoir le meilleur effet. Cela donne des déflecteurs longs – parfois terriblement longs – qui dépassent de la poupe où se trouve la plupart des organes de propulsion.
Les sorties d’eau de mer sur sous-marin n’étant pas à l’extrême arrière l’adoption de déflecteurs pourrait être faite sans incidence sur la longueur.
Foudre et silence dans les profondeurs
Le combat sous la mer est un sujet d’intérêt majeur pour la marine. les forces sous-marines actuellement sont mal préparées pour y acquérir et maintenir la maîtrise.
La marine américaine doit opérer régulièrement sur ou à proximité du fond marin, en haute mer comme près des côtes, avec des drones ou des sous-marins La précision requise pour manœuvrer un submersible par faibles fonds doit être bien meilleure que celle acceptée en eaux libres tant pour ne pas endommager le submersible que pour agir sur le fond. Dans certains cas, il faut pouvoir disposer de la capacité de rester parfaitement stationnaire, capacité équivalente à celles des moyens de positionnement dynamique des navires de surface.
L’hydrojet comme mode de propulsion principal autorise des évolutions rapides et serrées que seule la poussée dirigée peut générer, comme le démontre l’USS Freedom (LCS-1). Comme mode auxiliaire sur un sous-marin il ne permettrait pas de telles manœuvres, mais garantirait une grande discrétion.

La plupart des communications transatlantiques se font par l’intermédiaire de câbles posés sur le fond marin entre l’Amérique du Nord et l’Europe. Il est possible, pour les adversaires, de se brancher sur elles ou même de le sectionner. La Russie possède de petits sous-marins de plongée profonde conçus à cet effet. Les États-Unis disposent d’atouts équivalents aux capacités similaires. Les hydrojets pourraient améliorer leur furtivité et faciliter leur manœuvre sur ou près du fond.
L’hydrojet auxiliaire serait également utile en immersion. Un sous-marin en plongée privé de l’usage de son hélice du fait de l’explosion proche d’une torpille ou d’une avarie, court un risque grave. En cas d’agression rendant inutilisable la ligne d’arbres, Il serait aussi privé de toute propulsion : les hydrojets seraient alors un mode de propulsion de grand secours. Les recherches ici conduites suggèrent que des hydrojets auxiliaires pourraient propulser un sous-marin entre 5 et 10 nœuds. Dès lors l’installation d’hydrojets sur les SNLE qui patrouillent régulièrement à faible vitesse par souci de discrétion serait tout à la fois bénéfique et économique. L’ajout de buses et d’éjecteurs sur les sorties des circuits de réfrigération principale des SNLE leur permettrait de patrouiller sans utiliser la ligne d’arbres, d’où discrétion et moindre consommation de combustible nucléaire. Cela pourrait augmenter la durée de vie du bateau, la coque peut être renforcée et recertifiée au besoin, sans changement de cœur. La durée de vie des bateaux vieillissants de la classe Ohio pourrait être légèrement accrue, tandis que les nouveaux sous-marins de la classe Columbia auraient un temps de service prolongé de plusieurs années, le tout pour une affaire de plomberie peu importante et de système de pilotage tout aussi simple.
Source : Lieutenant Benjamin McFarland, U.S. Navy